音が流れない場合、再生を一時停止してもう一度再生してみて下さい。
ツール
2913回再生
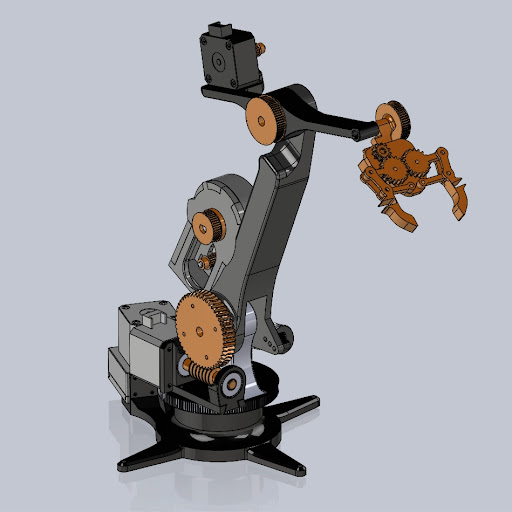
3D Printed Arduino Robot Arm V2 (Servo Arm)
I designed this robot arm in SolidWorks and 3D printed it. For the main pivot joints, it uses MG996 servos controlled by an Arduino Nano microcontroller.
The code maps the angle of the potentiometers in the small controller arm to the main arm's servos. I used linear interpolation to add smooth acceleration to all movements and hence reduce dynamic loads on the robot.
The linear axis uses a quarter-microstepped NEMA-17 stepper motor controlled by an Arduino Uno with an A4988 stepper motor driver. The code maps the position of the joystick proportionally to the motor rotation speed. The mechanical parts for the linear axis consist of GT2 timing belt and 3D printed linear bearings
コメント